 05 Nov 2017
05 Nov 2017
Mission Attraper un objet
Mindstorms
Poster
Mission
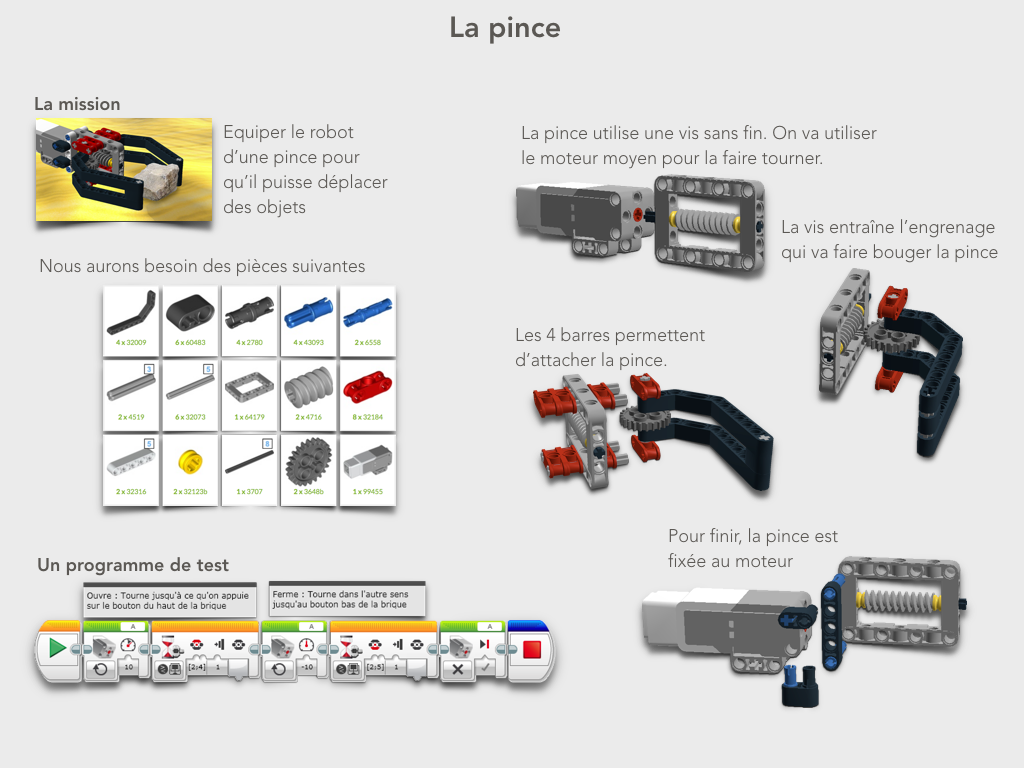
Un nouveau poster pour la fabrication d’une pince.
Le poster présente
- le but de la mission,
- le principe utilisé,
- les bases du montage à réaliser
- et un exemple simple de programme.
Les détails de la mission peuvent varier. Par exemple, cette pince peut être
- l’outil d’un rover martien qui déplacera des objets pour faciliter le passage.
- une main de robot qui attrape des objets
Pour déplacer un objet il faut généralement
- avancer jusqu’à une dizaine de centimètres de l’objet
- ouvrir la pince pour que les pointes de deux bras puissent se placer autour de l’objet
- avancer un peu pour positionner les pointes de chaque côté de l’objet à déplacer
- refermer un peu la pince
- déplacer le robot
- ouvrir la pince
Vous pouvez contrôler l’ouverture/fermeture de la pince en utilisant le nombre de dégrés du moteur, ou bien la commander avec les boutons de la brique (programme fourni) ou la télécommande en adaptant le programme.
3 pneus sur une tige font un objet de type tonneau facile à attraper et à déplacer.
Quelques infos pour vous aider
Les engrenages :
- Ne pas forcer l’ouverture ou la fermeture de la pince
- Les pièces rouges qui tiennent les engrenages se déboîtent un peu. C’est VOLONTAIRE. Si le montage est trop rigide, le bras bloqué empêchera le moteur de tourner, et c’est le moteur qui va s’abimer
- Si un bras n’a pas l’air de bouger quand le moteur tourne vérifier que le montage est bien en place
La vitesse du moteur
- Ne pas faire tourner le moteur trop vite, vous n’aurez pas le temps de l’arrêter ou le réglage du temps d’ouverture et de fermeture sera très compliqué à faire
- la pince s’ouvre quand le moteur tourne à vitesse positive, et se ferme à vitesse négative
Crédits
Ce montage s’inspire du modèle de pince de William sur Rebrickable